

步进电机驱动原理
步进电机属于无刷直流(BLDC)电机,它按照等长的步进值逐步转动。
步进电机又叫脉冲电机,基于最基本的电磁铁原理,是一种可以自由回转的电磁铁,其动作原理是依靠气隙磁导的变化来产生电磁转矩。它可以将电脉冲信号转化成相应角位移或线位移,每输入一个脉冲信号,转子就转动一个角度或前进一步,其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。
双极性步进电机
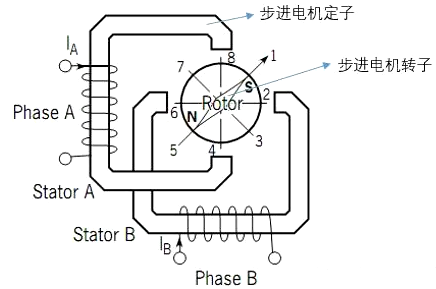
双极性步进电机结构简化示意图:
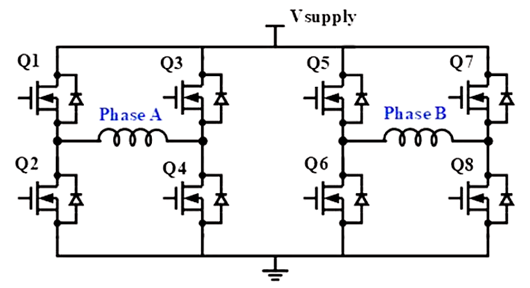
双全桥驱动电路图
双极性步进电机具有三种控制模式:单相步进、整步步进和半步步进。
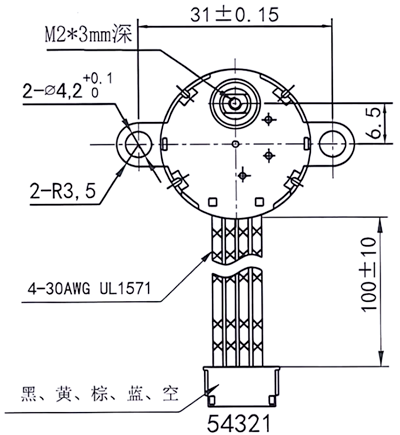
五线步进减速电机
下图为五线步进减速电机外形图及接线示意图,五线电机多出的一根线是公共电源线,接到外部的5V或者12V电源,这根线从电机内部的两个线圈的中间抽头引出,并短接在一起。
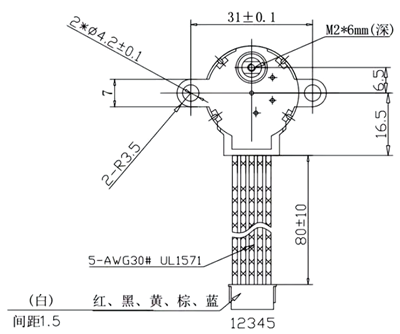
五线的步进电机可以通过达林顿管的方式进行驱动,也是目前最为常见的驱动方式。在使用达林顿管驱动时,线圈电流的方向都是固定的从公共端流入,再从另外的四根线的端口流出,这种驱动方式也叫单极性驱动。
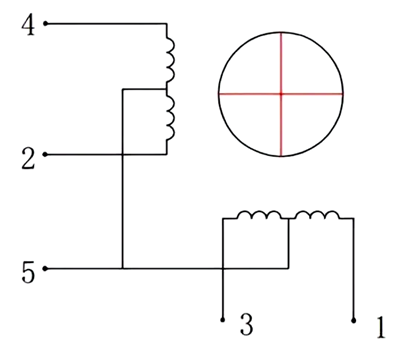
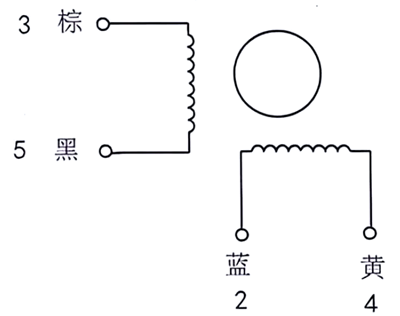
四线步进减速电机
下图为四线步进减速电机外形图及接线示意图,四线的步进电机则需要通过全桥电路进行驱动。在正常驱动时,线圈内部电流有正、负两个方向,这种驱动方式也被称为双极性驱动;
四线的步进电机,厂家一般会在规格书上推荐用2-2相励磁的方式进行驱动;而五线的步进电机则会建议使用1-2相励磁的方式来驱动。
驱动方式
每一步都是两个线圈同时励磁,故被称为2-2相励磁。线圈磁场方向也就是电机受力方向与电流方向存在固定的角度对应关系,因此电机的受力方向可以转换成电流矢量合成图来表示(见下图)。该图展示的是一个电气周期/驱动周期内电流矢量的变化情况,A相电流和B相电流分别影响两个不同方向分量的力矩。
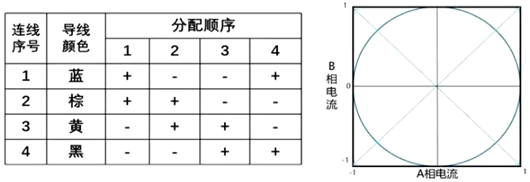
在初始时刻,A相电流和B相电流同时为正,电流合成矢量指向STEP1,电机的转子被吸引至STEP1方向上;
再下一步,A相电流由正变负,电流合成矢量指向了STEP2,电机转子也被吸引至STEP2方向上,电机就转动了一个步距角。
再下一步,A相电流保持负,B相电流由正变负,电流合成矢量指向STEP3,电机转子被吸引至STEP3方向上,电机再次转动一个步距角。
以此类推,不断的改变A、B相电流的方向,即可让转子持续的转动。转子转动4个步距角之后,又会回到STEP1的方向上,整个电气周期共4步,被称为四拍驱动。
1-2相励磁相较2-2相励磁,多了单个线圈独立励磁,因此被称为1-2相励磁。
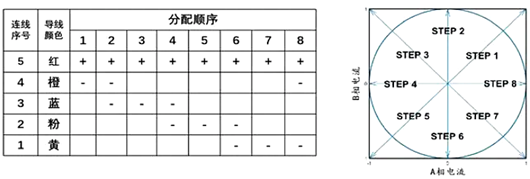
下图是1-2相励磁的励磁顺序表,对于五线的步进电机,电机线圈结构会有些许差异,但驱动步进电机的核心原则是不变的,原本一个可以产生两个相反方向磁场的线圈被拆分成了两个单极性线圈,分别产生两个方向的磁场。
通过控制四个线圈的电流通断,来控制电流合成矢量的方向,让电机转动。在这种驱动方式下,一个电气周期共八拍,也被称为八拍驱动。
〈烜芯微/XXW〉专业制造二极管,三极管,MOS管,桥堆等,20年,工厂直销省20%,上万家电路电器生产企业选用,专业的工程师帮您稳定好每一批产品,如果您有遇到什么需要帮助解决的,可以直接联系下方的联系号码或加QQ/微信,由我们的销售经理给您精准的报价以及产品介绍
联系号码:18923864027(同微信)
QQ:709211280