

四轴飞行器是近来在专业与非专业领域都非常火爆的技术产品。下面这篇文章针对四轴飞行器无位置传感器无刷直流电机的驱动控制,设计开发了三相六臂全桥驱动电路及控制程序。设计采用ATMEGA16单片机作为控制核心,利用反电势过零点检测轮流导通驱动电路的6个MOSFET实现换向;直流无刷电机控制程序完成MOSFET上电自检、电机启动软件控制,PWM电机转速控制以及电路保护功能。该设计电路结构简单,成本低、电机运行稳定可靠,实现了电机连续运转。近年来,四轴飞行器的研究和应用范围逐步扩大,它采用四个无刷直流电机作为其动力来源。无刷直流电机为外转子结构,直接驱动螺旋桨高速旋转。
无刷直流电机的驱动控制方式主要分为有位置传感器和无位置传感器的控制方式两种。由于在四轴飞行器中的要求无刷直流电机控制器要求体积小、重量轻、高效可靠,因而采用无位置传感器的无刷直流电机。本文采用的是朗宇X2212 kv980无刷直流电机。无刷直流电机驱动控制系统包括驱动电路和系统程序控制两部分。采用功率管的开关特性构成三相全桥驱动电路,之后使用DSP作为主控芯片,借助其强大的运算处理能力,实现电机的启动与控制,但电路结构复杂成本高,缺乏经济性。直流无刷电机的换向采用反电势过零检测法,一旦检测到第三相的反电势过零点就为换向做准备。反电势过零检测采用虚拟中性点的方法,通过检测电机各相的反电势过零点来判断转子位置。而基于电机三相绕组端电压变化规律的电机电流换向理论,可以大大提高系统控制精度。
本文无刷直流电机的驱动电路采用三相六臂全桥电路,控制电路的管理控制芯片采用ATmega 16单片机实现,以充分发挥其高性能、资源丰富的特点,因而外围电路结构简单。无刷直流电机采用软件启动和PWM速度控制的方式,实现电机的启动和稳定运行,大大提高四轴飞行器无刷直流电机的调速和控制性能。
三相六臂全桥驱动电路
无刷直流电机驱动控制电路如图1 所示。该电路采用三相六臂全桥驱动方式,采用此方式可以减少电流波动和转矩脉动,使得电机输出较大的转矩。在电机驱动部分使用6个功率场效应管控制输出电压,四轴飞行器中的直流无刷电机驱动电路电源电压为12 V.驱动电路中,Q1~Q3采用IR公司的IRFR5305(P沟道),Q4~Q6为IRFR1205(N 沟道)。该场效应管内藏续流二极管,为场效应管关断时提供电流通路,以避免管子的反向击穿,其典型特性参数见表1.T1~T3 采用PDTC143ET为场效应管提供驱动信号。
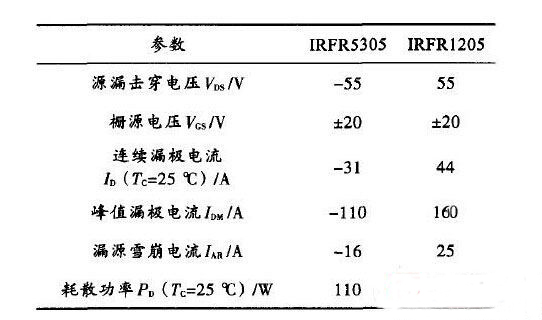
表1 MOSFET管参数
由图1 可知,A1~A3 提供三相全桥上桥臂栅极驱动信号,并与ATMEGA16单片机的硬件PWM驱动信号相接,通过改变PWM信号的占空比来实现电机转速控制;B1~B3提供下桥臂栅极驱动信号,由单片机的I/O口直接提供,具有导通与截止两种状态。
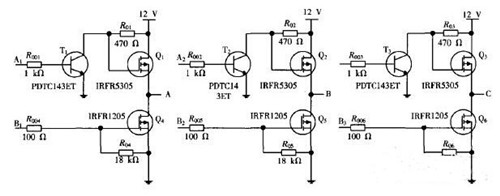
图1 无刷直流电机三相六臂全桥驱动电路
无刷直流电机驱动控制采用三相六状态控制策略,功率管具有六种触发状态,每次只有两个管子导通,每60°电角度换向一次,若某一时刻AB 相导通时,C 相截至,无电流输出。单片机根据检测到的电机转子位置,利用MOSFET的开关特性,实现电机的通电控制,例如,当Q1、Q5 打开时,AB 相导通,此时电流流向为电源正极→Q1→绕组A→绕组B→Q5→电源负极。类似的,当MOSFET 打开顺序分别为Q1Q5,Q1Q6,Q2Q6,Q2Q4,Q3Q4,Q3Q5时,只要在合适的时机进行准确换向,就可实现无刷直流电机的连续运转。反电势过零检测
无刷直流电机能够正常连续运转,就要对转子位置进行检测,从而实现准确换向。电机转子位置检测方式主要有光电编码盘、霍尔传感器、无感测量三种方式。由于四轴飞行器无刷直流电机要求系统结构简单、重量轻,因而采用无位置传感器的方式,利用第三相产生的感生电动势过零点时刻延迟30°换向。虽然该方法在电机启动时比较麻烦,可控性差,但由于电路简单、成本低,因而适合于在正常飞行过程中不需要频繁启动的四轴飞行器电机。
由于无刷直流电机的两相导通模式,因而可以利用不导通的第三相检测反电势的大小。如图2反电势检测电路,中性点N 与单片机的AIN0 相接,Ain,Bin,Cin分别接单片机的ADC0,ADC1,ADC2.不停地比较中性点N电压与A,B,C三相三个端点电压的大小,以检测出每相感生电动势的过零点。ATMEGA16单片机模拟比较器的正向输入端为AIN0,负向输入端根据ADMUX寄存器的配置而选择 ADC0,ADC1,ADC2,从而利用了单片机自带的模拟比较器的复用功能。当A,B相通电期间,C相反电势与中性点N进行比较,类似的,就可以成功检测出各相的过零事件。
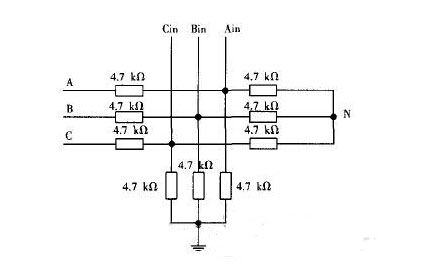
图2 反电势检测电路
电机的反电势检测出来后,就可以找到反电势的过零点,在反电势过零后延迟30°电角度进行换向操作。
驱动电路采用三相六臂全桥电路,MOSFET 作为开关元件,利用ATmega 16 单片机作为控制芯片,反电势过零检测以及软件启动的控制方式,并延迟30°进行换向。正常启动后,单片机输出PWM 实现无刷直流电机转速调节。同时设计了电压、电流监测电路,保证系统安全,因而,该系统能够正常驱动无位置传感器无刷直流电机,并且能够应用于四轴飞行器。
烜芯微专业制造二极管,三极管,MOS管,桥堆等20年,工厂直销省20%,4000家电路电器生产企业选用,专业的工程师帮您稳定好每一批产品,如果您有遇到什么需要帮助解决的,可以点击右边的工程师,或者点击销售经理给您精准的报价以及产品介绍
烜芯微专业制造二极管,三极管,MOS管,桥堆等20年,工厂直销省20%,4000家电路电器生产企业选用,专业的工程师帮您稳定好每一批产品,如果您有遇到什么需要帮助解决的,可以点击右边的工程师,或者点击销售经理给您精准的报价以及产品介绍